
直播節選
感謝腦客中國的邀請。我是來自于復旦大學附屬華山醫院康復醫學科的陸醫生,今天很高興有這個機會在這里和大家一起來相互交流、分享一下腦機交互技術在我們中樞神經系統康復中的應用以及研究的一些進展。
大家可能看過在1999年拍攝的黑客帝國,其中一個橋段我至今記憶憂深,就是主人公可以通過電腦進入另外一個平行的虛擬世界。在當時,這樣的一部電影肯定屬于科幻電影,而到現在2021年的話,這些科幻技術其實已經變成了現實。
01腦機接口技術概述
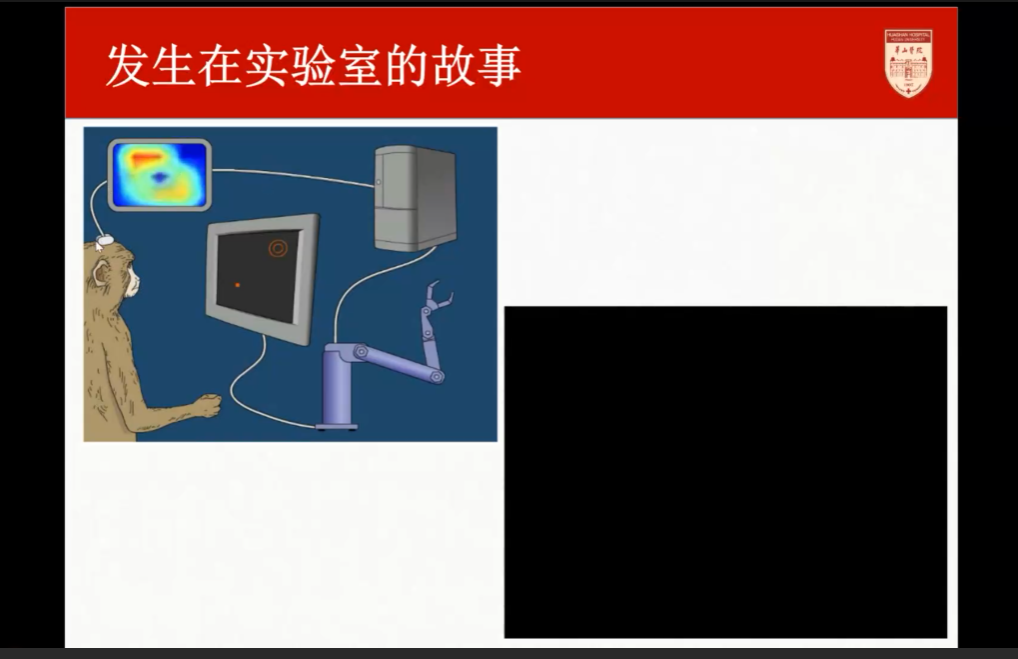
首先我們來看一下在實驗室里訓練猴子的任務。左上角的圖中有一個猴子,在他的頭上有一個信號接收器,當猴子能夠把屏幕上面的紅點移動到右上角的圓圈里面后,機械臂就可以給猴子進行一個喂食的動作。在這樣的一個反饋情境下,猴子是可以很順暢的完成這個動作的。所以我們知道它是可以通過訓練使得猴子通過腦直接控制機械臂。
我們知道對于神經損傷的這個患者而言,在2001年的時候就有學者指出,有兩種方法可以促進他們的功能恢復。第一是修復損傷的神經軸突,我們知道這個過程是比較困難的;第二個就是讓他們來直接控制神經假肢。

在2001年的時候,研究者就設想是不是可以在我們的人腦當中植入一個神經芯片,這樣以后我們可能可以把腦信號直接傳輸給電腦,信號傳輸就能繞過損傷的部位;當計算機接收到信號之后,又可以把這個信號轉化為其他類型,比如控制輪椅這個操作過程。
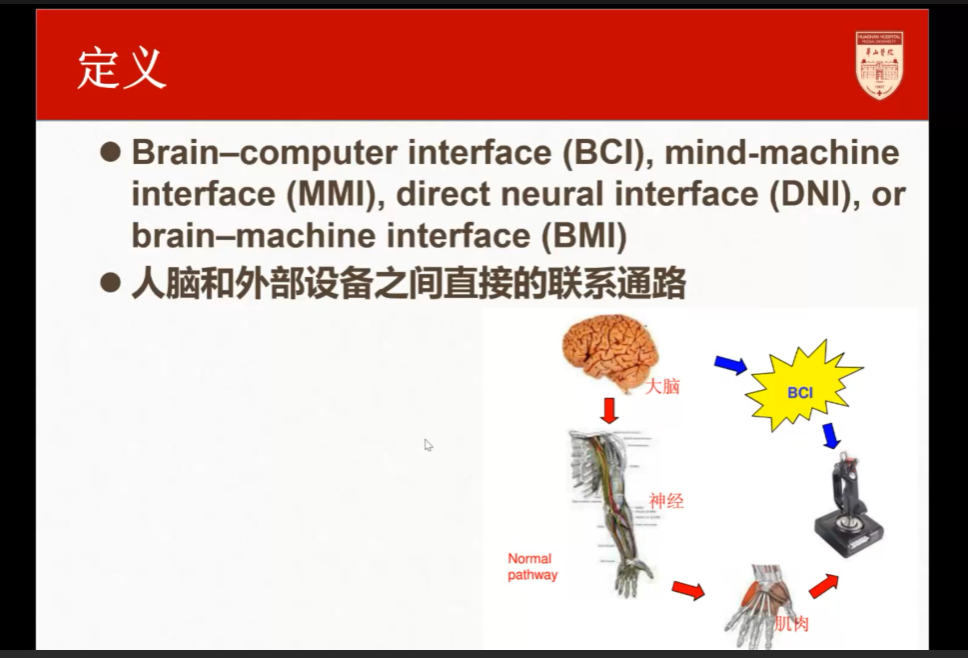
這樣的一種技術就被稱為腦計算機交互技術,就是在我們人腦和外部設備之間建立了一個直接的聯系通路。我們知道傳統的通路是我們大腦發出一個信號,通過中樞神經跟周圍神經把這個信號傳輸到我們的效應器,通常是我們肌肉,然后再由肌肉來完成相應的動作。而利用腦機交互技術的話,我們就可以繞過中樞傳輸的中樞神經系統和周圍神經系統以及效應器直接控制外界設備,完成相應的動作。
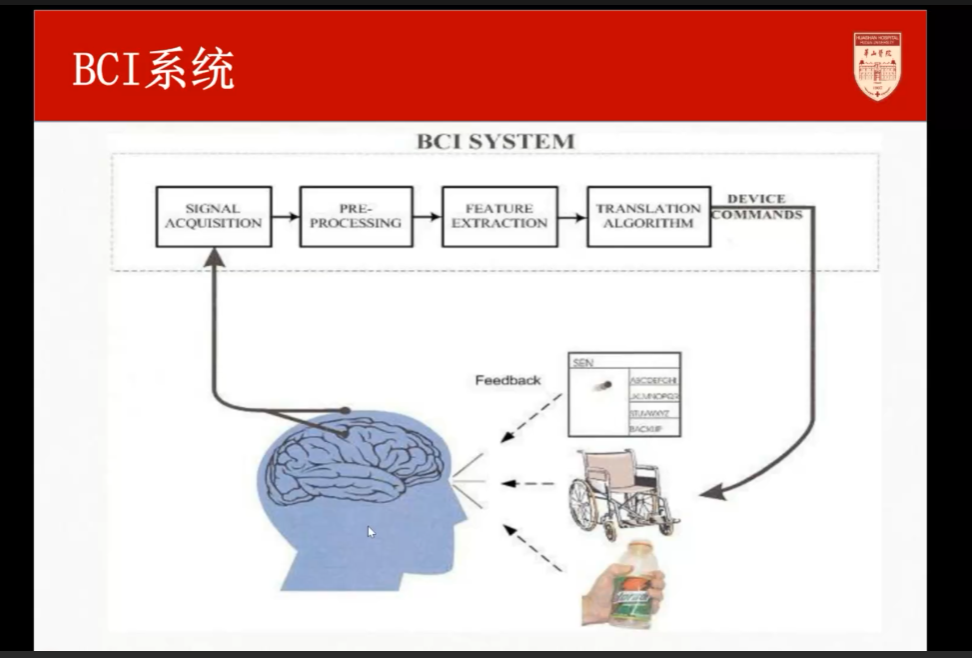
下圖就是腦計算機接口系統的工作模式,在人腦發出相應的腦電信號之后,提取出腦電信號的特征模式并進行預處理,然后通過算法完成信號的轉化和解碼的過程。輸出一個新的可以被計算機識別的信號,它就可以來支配很多外界不同的終端設備。比如說我們可以通過電信號來控制光標在屏幕上面的移動;也可以控制輪椅進的行進、后退或者是轉彎的動作;還可以通過和功能性電刺激聯用,來完成相應的抓握等動作。
02發展現狀
基于腦電信號的腦機接口系統其實可以分成幾類,第一種就是我們目前用的比較多的基于自發腦電的腦機接口。它是一種主動式的腦機接口系統,它是利用使用者自主運動想象產生的事件相關同步或去同步(ERD/ERS)。它便于使用,應用廣泛,但存在可用性差的特點,控制所用的運動想象特征模式的產生需要使用者長時間訓練,且存在高比例訓練不成功者的現象。
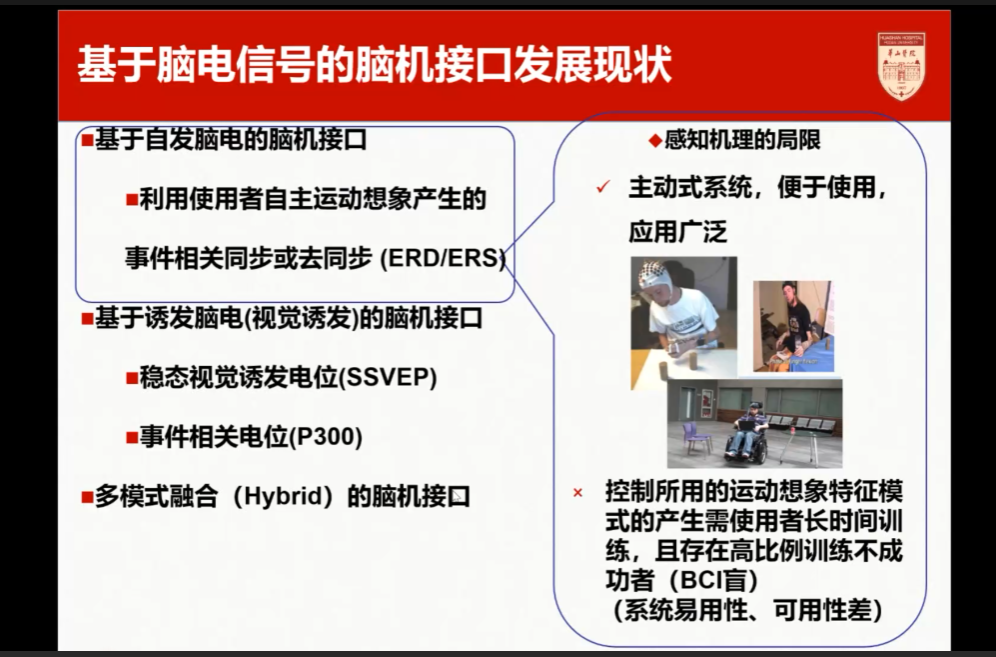
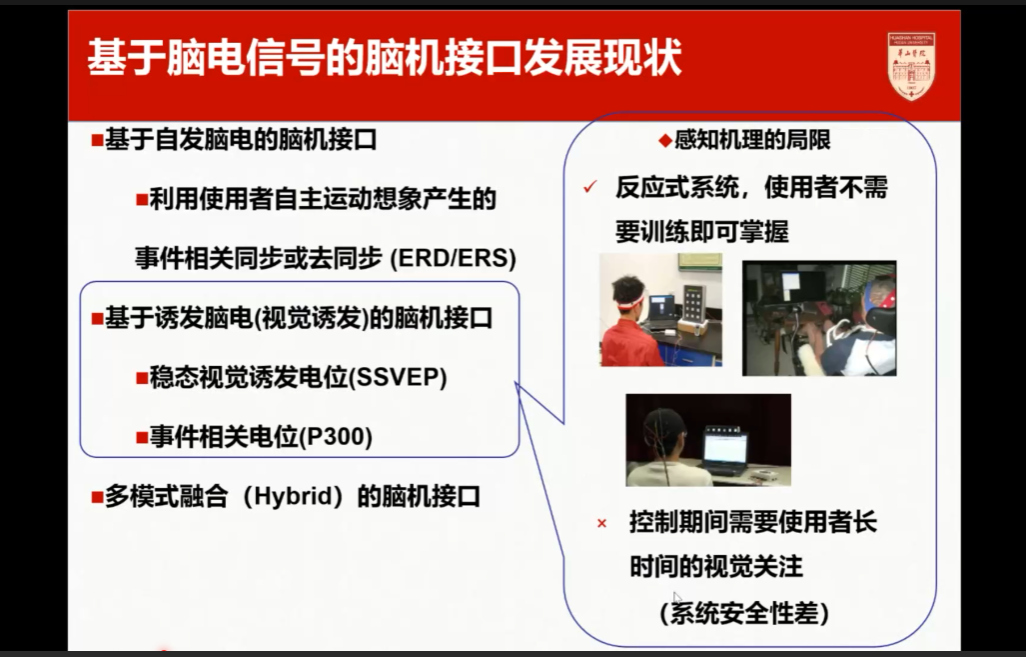
第二類的話是基于誘發腦電(視覺誘發)的腦機接口,它主要是通過穩態視覺誘發電位SSVEP和事件相關電位P300作為一個基礎。它是一種反應式系統,使用者不需要進行訓練就可以掌握。但是在使用過程中,它需要使用者長時間的視覺關注,也就是系統安全性差。
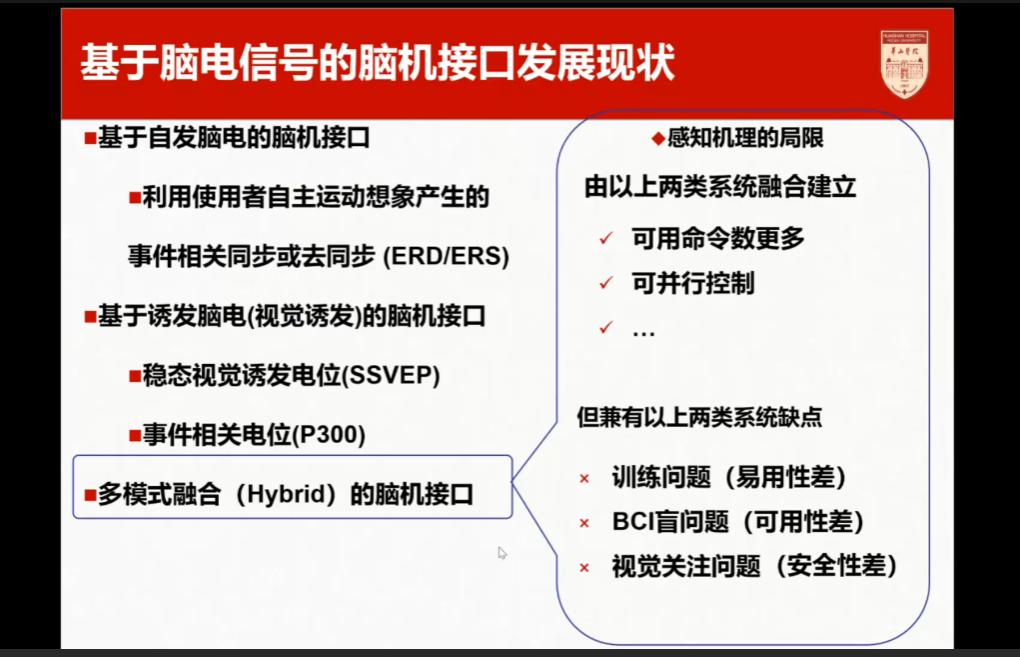
第三種就是多模式融合的腦機接口,它同時兼具了自發腦電的腦機接口和誘發腦電的暖腦機接口。它是由以上兩類系統融合而成,可以使用的命令數更多,可以操縱的東西更復雜,是它的優點;它的缺點也就是兼具了上述兩類腦機接口的缺點,包括訓練問題、BCI盲問題,以及視覺高度關注的問題。
英智科技




在線溝通,請點我在線咨詢
咨詢熱線:
0755-21611741
客服qq:
2083990141




